Integral algebra for simulating dynamical systems with interval uncertainties
Luc Jaulin
This microsite is associated to the paper
 Integral algebra for simulating dynamical systems with interval uncertainties
Integral algebra for simulating dynamical systems with interval uncertainties
This work presents an integral algebra and shows how it can be used to simulate a dynamical system with interval uncertainties.
These uncertainties, can be either on the initial state vector or on the evolution function.
Compare to other techniques used for the guaranteed integration of differential inclusion, the presented approach does not require the use of a fixed-point Picard operator.
Three test-cases related to robotics are presented to illustrate the efficiency of the approach.
The Python code for the three test-cases is given below.
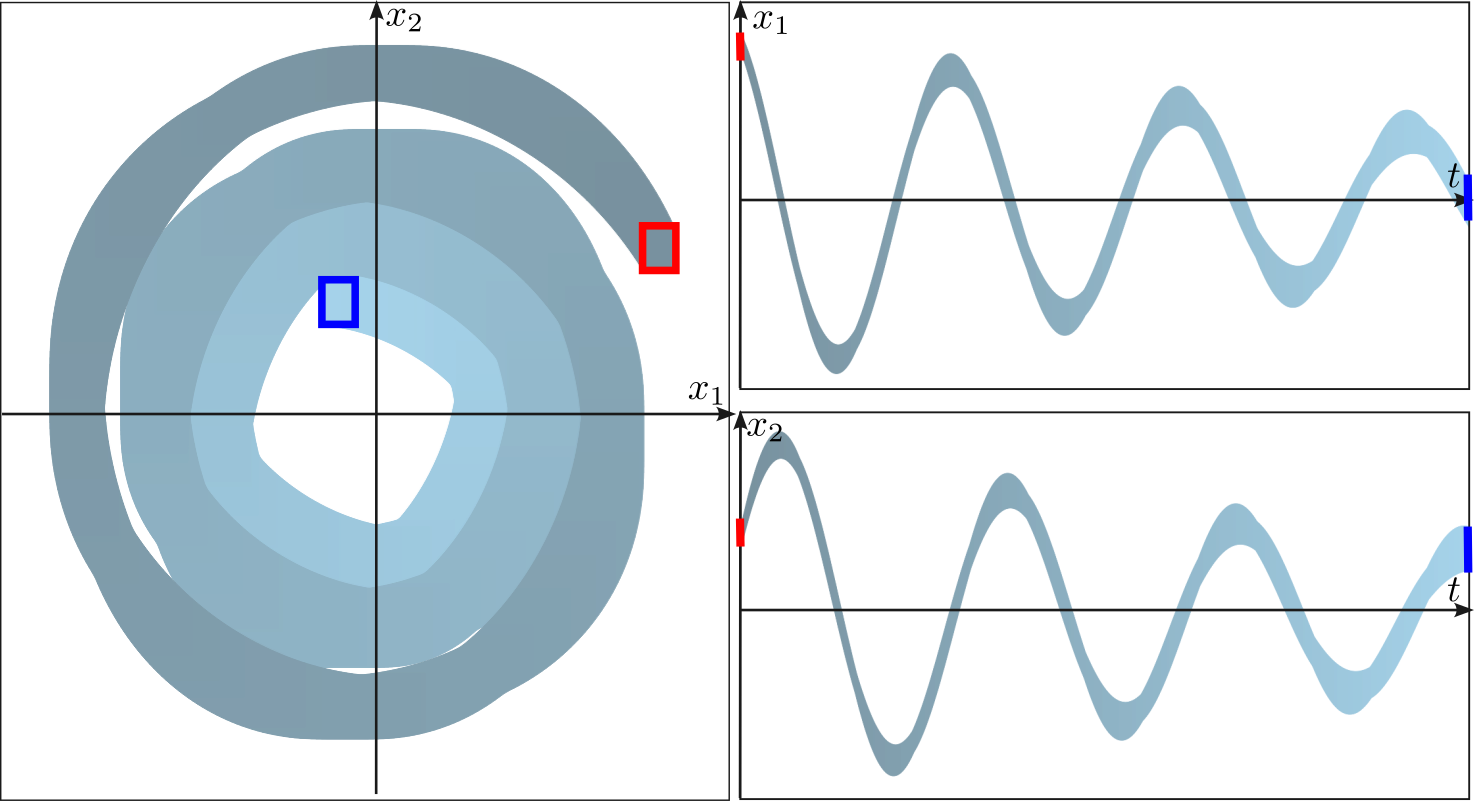
Linear system
from codac import *
dt = 0.01
tmax=10
tdomain = Interval(0,tmax)
beginDrawing()
fig_map = VIBesFigMap("Example Linear")
fig_map.set_properties(50, 50, 1200, 600)
fig_map.axis_limits(-3,3,-3,3)
fig_map.smooth_tube_drawing(True)
fig_map.show(1.)
tt = Trajectory(tdomain, TFunction("t"), dt)
u = TubeVector(tdomain, dt, 2)
u[0] = Tube(0*tt,dt) + Interval(-0.02,0.02)
u[1] = Tube(0*tt,dt) + Interval(-0.02,0.02)
tt = Tube(tt,dt) + 0.0000001*Interval(-1,1)
def TubeSimu(x10,x20):
L,w=-0.1,2
v1=x10+(exp(-L*tt)*( cos(w*tt)*u[0]+sin(w*tt)*u[1])).primitive()
v2=x20+(exp(-L*tt)*(-sin(w*tt)*u[0]+cos(w*tt)*u[1])).primitive()
x1=exp(L*tt)*(v1*cos(w*tt)-v2*sin(w*tt))
x2=exp(L*tt)*(v1*sin(w*tt)+v2*cos(w*tt))
y=TubeVector(tdomain, dt, 2)
y[0],y[1]=x1,x2
fig_map.add_tube(y, "y",0,1)
x1=2+Interval(-0.1,0.1)
x2=1+Interval(-0.1,0.1)
TubeSimu(x1,x2)
fig_map.show(1.)
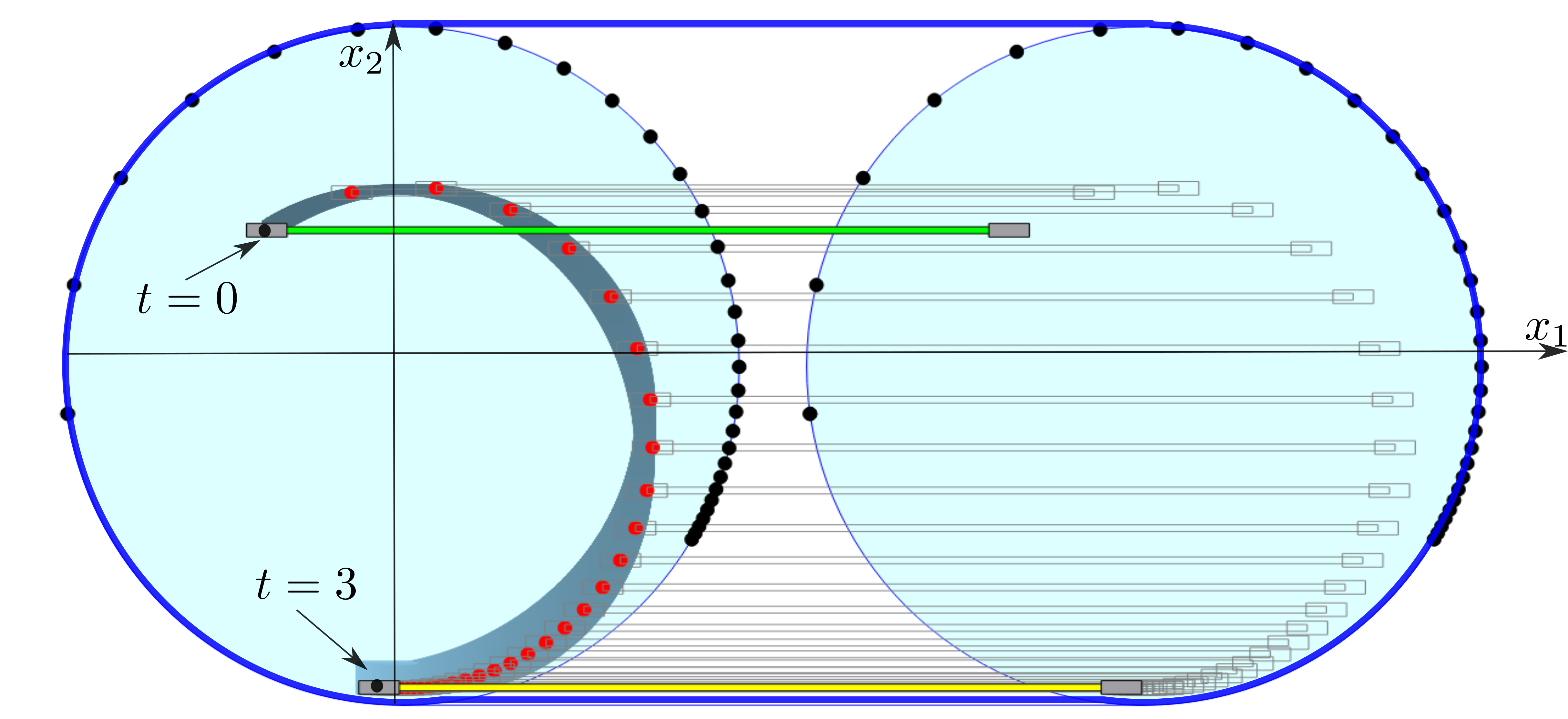
Turnstile
from codac import *
import numpy as np
dt = 0.01
tmax=3
tdomain = Interval(0,tmax)
beginDrawing()
fig_map = VIBesFigMap("shape")
fig_map.set_properties(50, 50, 1200, 600)
fig_map.axis_limits(-10,10,-10,10)
fig_map.smooth_tube_drawing(True)
fig_map.show(1.)
u = TubeVector(tdomain, dt, 2)
u1 = Trajectory(tdomain, TFunction("4*exp(-t)"), dt)
u2 = Trajectory(tdomain, TFunction("4*exp(-t)"), dt)
u[0] = Tube(u1,dt) + Interval(-0.01,0.01)
u[1] = Tube(u2,dt) + Interval(-0.01,0.01)
i=1
def TubeSimu(x10,x20,x30):
global i
v10=cos(x30)*x10-sin(x30)*x20
v20=sin(x30)*x10+cos(x30)*x20
x3=x30+u[1].primitive()
v1=v10+(u[0]*cos(x3)).primitive()
v2=v20+(u[0]*sin(x3)).primitive()
x1= cos(x3)*v1+sin(x3)*v2
x2=-sin(x3)*v1+cos(x3)*v2
y=TubeVector(tdomain, dt, 2)
y[0],y[1]=x1,x2
fig_map.add_tube(y, "y"+str(i), 0, 1)
i=i+1
def draw_turnstile(x,colorbody,colorwheel="black[gray]"):
x1,x2,x3=x[0,0],x[1,0],x[2,0]
e=0.05
P=[[0,-e],[2*R+1,-e],[2*R+1,e],[0,e]]
Pfront=[[A[0]+x1,A[1]+x2] for A in P]
fig_map.draw_polygon(Polygon(Pfront), colorbody)
Q0=[[0.3,-0.1],[0.3,0.1],[-0.3,0.1],[-0.3,-0.1]]
Q=[[A[0]+x1,A[1]+x2] for A in Q0]
fig_map.draw_polygon(Polygon(Q), colorwheel)
Q=[[A[0]+x1+2*R+1,A[1]+x2] for A in Q0]
fig_map.draw_polygon(Polygon(Q),colorwheel)
fig_map.draw_circle(R*cos(-x3-2),R*sin(-x3-2),0.1,"black[black]")
fig_map.draw_circle(2*R+1+R*cos(-x3-2),R*sin(-x3-2),0.1,"black[black]")
x0 = np.array([[-2],[2],[1]])
dE1,dE2,dE3=0.01,0.01,0.1
ds=0.01
R=5
fig_map.draw_circle(0,0,R,"blue[#DDFFFF]")
fig_map.draw_circle(2*R+1,0,R,"blue[#DDFFFF]")
fig_map.draw_line([0,2*R+1],[R,R],"blue")
fig_map.draw_line([0,2*R+1],[-R,-R],"blue")
for s1 in np.arange(-dE1,dE1,ds): # We bisect the initial box
x1=x0[0,0]+Interval(s1,s1+ds)
for s2 in np.arange(-dE2,dE2,ds):
x2=x0[1,0]+Interval(s2,s2+ds)
for s3 in np.arange(-dE3,dE3,ds):
x3=x0[2,0]+Interval(s3,s3+ds)
TubeSimu(x1,x2,x3)
x=x0
for t in np.arange(0,tmax,dt):
def f(x,t):
x1,x2,x3=x[0,0],x[1,0],x[2,0]
u1,u2=4*np.exp(-t),4*np.exp(-t)
return (np.array([[u1+u2*x2],[-u2*x1],[u2]]))
fig_map.draw_circle(x[0,0],x[1,0],0.1,"red[red]")
draw_turnstile(x,"grey[]","grey[]")
x=x+dt*f(x,t)
draw_turnstile(x0,"black[green]")
draw_turnstile(x,"black[yellow]")
fig_map.show(1.)
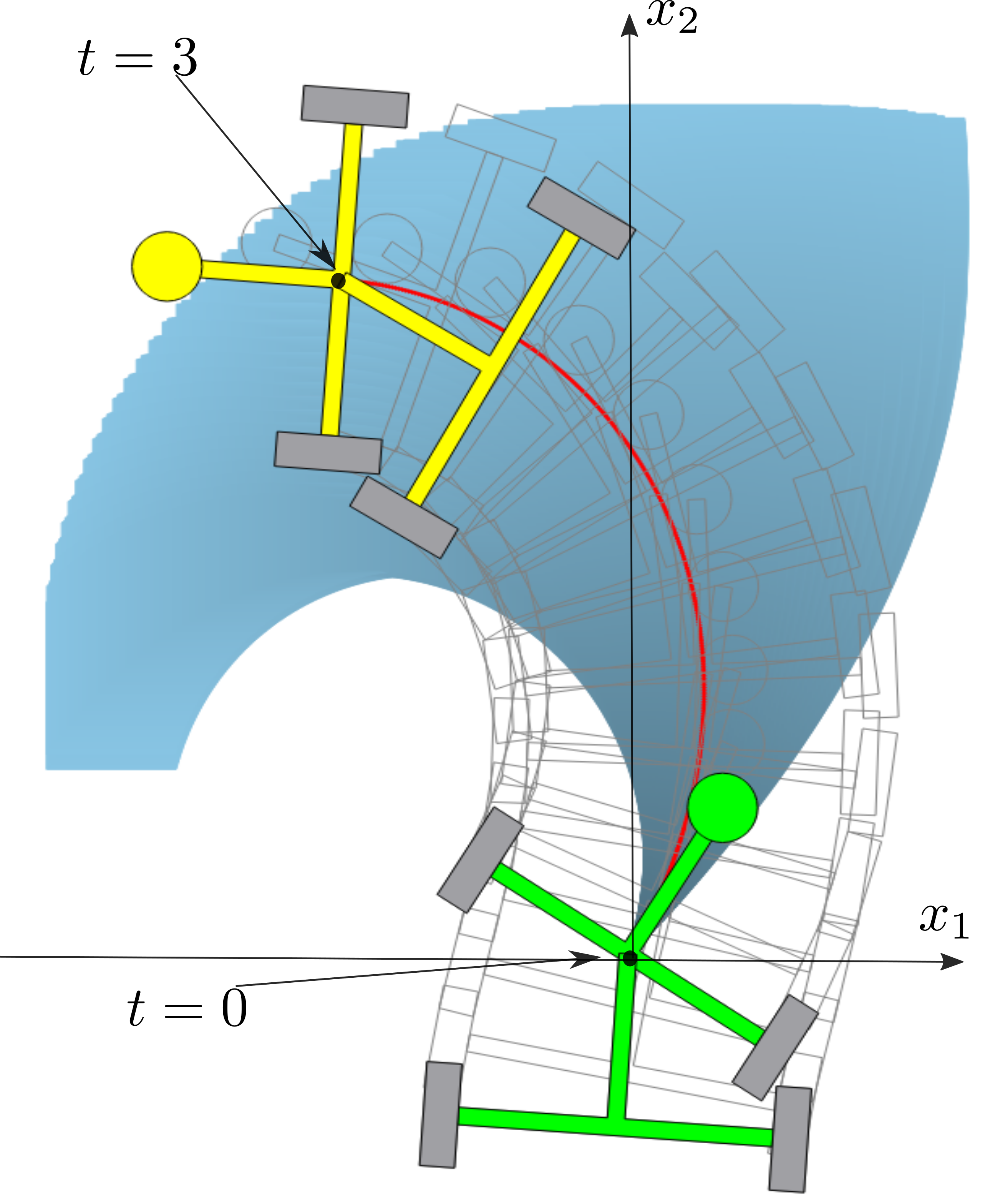
Car-trailer
from codac import *
import numpy as np
dt = 0.01
tmax=3
tdomain = Interval(0,tmax)
beginDrawing()
fig_map = VIBesFigMap("shape")
fig_map.set_properties(50, 50, 1200, 600)
fig_map.axis_limits(-5,5,-3,6)
fig_map.smooth_tube_drawing(True)
fig_map.show(1.)
u = TubeVector(tdomain, dt, 2)
u1 = Trajectory(tdomain, TFunction("exp(-t)"), dt)
u2 = Trajectory(tdomain, TFunction("exp(-t)"), dt)
u[0] = Tube(u1,dt) + Interval(-0.01,0.01)
u[1] = Tube(u2,dt) + Interval(-0.01,0.01)
i=1
def TubeSimu(x10,x20,x30,x40,x50):
global i
v10=x30-x40
v1=u[0].primitive()+v10
x5=u[1].primitive()+x50
x4=x40 + (x5*sin(v1)).primitive()
x3 = x4+v1
x1 = x10+(x5*cos(x3)).primitive()
x2 = x20+(x5*sin(x3)).primitive()
y=TubeVector(tdomain, dt, 2)
y[0],y[1]=x1,x2
fig_map.add_tube(y, "y"+str(i), 0, 1)
i=i+1
def move(x1,x2,a,t1=0,t2=0):
y1=np.cos(a)*x1-np.sin(a)*x2+t1
y2=np.sin(a)*x1+np.cos(a)*x2+t2
return [y1,y2]
def draw_cartrailer(x,colorbody,colorwheel="black[gray]"):
def draw_body(a,x1,x2):
e=0.05
P=[[1,e],[e,e],[e,0.9],[-e,0.9],[-e,-0.9],[e,-0.9],[e,-e],[1,-e],[1,e]]
Pfront=[move(A[0],A[1],a,x1,x2) for A in P]
fig_map.draw_polygon(Polygon(Pfront), colorbody)
Q0=[[0.3,-0.1],[0.3,0.1],[-0.3,0.1],[-0.3,-0.1]]
Q=[move(A[0],A[1],0,0,1) for A in Q0]
Q=[move(A[0],A[1],a,x1,x2) for A in Q]
fig_map.draw_polygon(Polygon(Q), colorwheel)
Q=[move(A[0],A[1],0,0,-1) for A in Q0]
Q=[move(A[0],A[1],a,x1,x2) for A in Q]
fig_map.draw_polygon(Polygon(Q),colorwheel)
x1,x2,x3,x4=x[0,0],x[1,0],x[2,0],x[3,0]
draw_body(x3,x1,x2)
fig_map.draw_circle(x1+np.cos(x3),x2+np.sin(x3),0.2,colorbody)
z1=-np.cos(x4)+x1
z2=-np.sin(x4)+x2
draw_body(x4,z1,z2)
x0 = np.array([[0],[0],[1],[1.5],[1]]) #(x,y,heading_front,heading_back,speed_front
dE1,dE2,dE3,dE4,dE5=0.001,0.001,0.2,0.01,0.001
ds=0.01
for s1 in np.arange(-dE1,dE1,ds): # We bisect the initial box
x1=x0[0,0]+Interval(s1,s1+ds)
for s2 in np.arange(-dE2,dE2,ds):
x2=x0[1,0]+Interval(s2,s2+ds)
for s3 in np.arange(-dE3,dE3,ds):
x3=x0[2,0]+Interval(s3,s3+ds)
for s4 in np.arange(-dE4,dE4,ds):
x4=x0[3,0]+Interval(s4,s4+ds)
for s5 in np.arange(-dE5,dE5,ds):
x5=x0[4,0]+Interval(s5,s5+ds)
TubeSimu(x1,x2,x3,x4,x5)
x=x0
for t in np.arange(0,tmax,dt):
def f(x,t):
x1,x2,x3,x4,x5=x[0,0],x[1,0],x[2,0],x[3,0],x[4,0]
u1,u2=np.exp(-t),np.exp(-t)
return (np.array([[x5*np.cos(x3)],[x5*np.sin(x3)],[u1+x5*np.sin(x3-x4)],[x5*np.sin(x3-x4)],[u2]]))
def draw_center(x):
xc,yc=move(0,0,x[2,0],x[0,0],x[1,0])
fig_map.draw_circle(xc,yc,0.01,"red[red]")
draw_center(x)
draw_cartrailer(x,"grey[]","grey[]")
x=x+dt*f(x,t)
draw_center(x)
draw_cartrailer(x0,"black[green]")
draw_cartrailer(x,"black[yellow]")
fig_map.show(1.)
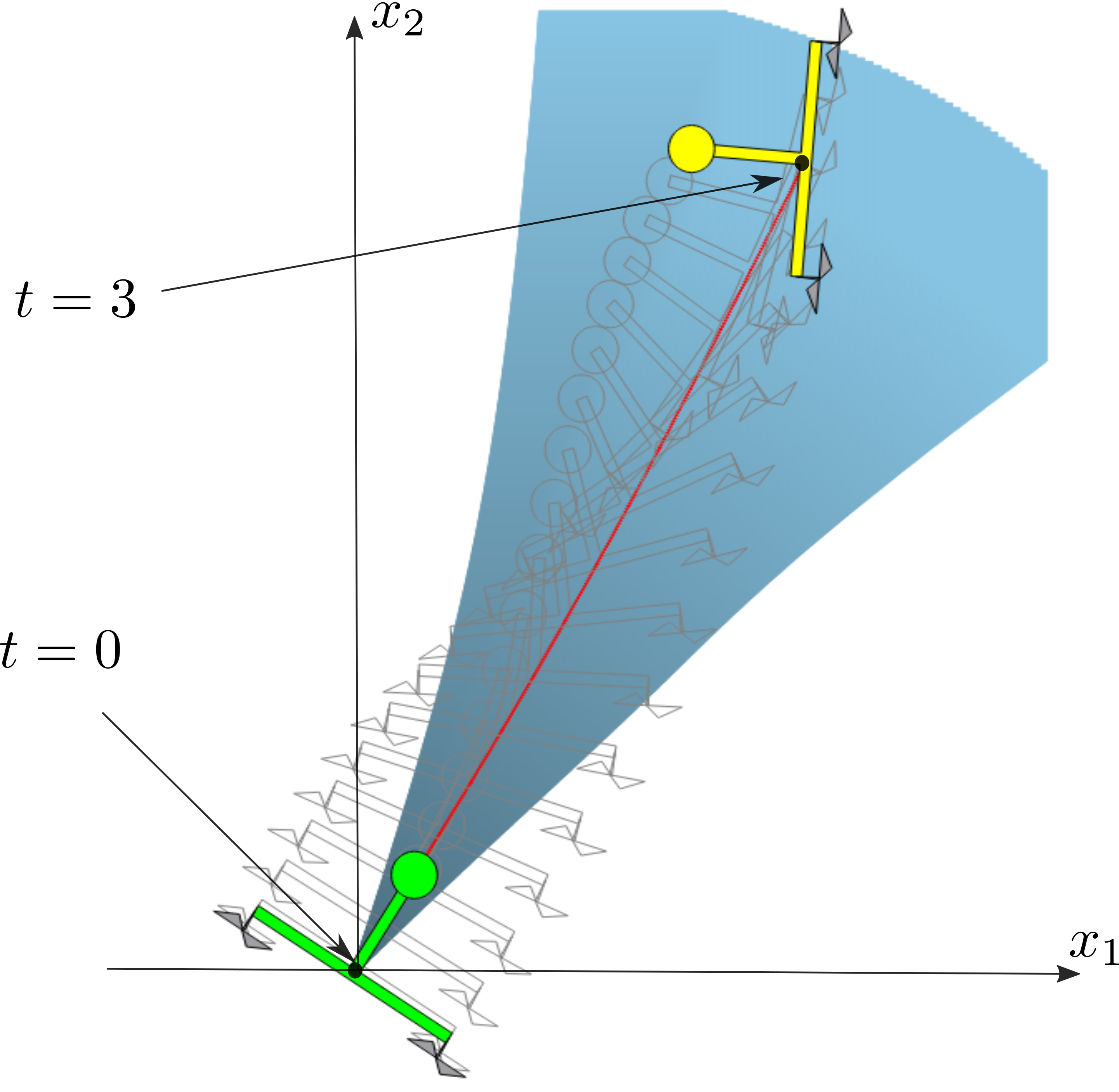
Hovercraft
from codac import *
import numpy as np
dt = 0.01
tmax=3
tdomain = Interval(0,tmax)
beginDrawing()
fig_map = VIBesFigMap("shape")
fig_map.set_properties(50, 50, 1200, 600)
fig_map.axis_limits(-2,8,-2,9)
fig_map.smooth_tube_drawing(True)
fig_map.show(1.)
u = TubeVector(tdomain, dt, 2)
u1 = Trajectory(tdomain, TFunction("exp(-t)"), dt)
u2 = Trajectory(tdomain, TFunction("exp(-t)"), dt)
du=0.01
u[0] = Tube(u1,dt) + Interval(-du,du)
u[1] = Tube(u2,dt) + Interval(-du,du)
i=1
def TubeSimu(x10,x20,v10,v20,psi0,w0):
global i
w=w0+u[1].primitive()
psi=psi0+w.primitive()
a10=cos(psi0)*v10-sin(psi0)*v20
a20=sin(psi0)*v10+cos(psi0)*v20
a1=a10+(u[0]*cos(psi)).primitive()
a2=a20+(u[0]*sin(psi)).primitive()
v1=cos(psi)*a1+sin(psi)*a2
v2=-sin(psi)*a1+cos(psi)*a2
x1 = x10+(cos(psi)*v1-sin(psi)*v2).primitive()
x2 = x20+(sin(psi)*v1+cos(psi)*v2).primitive()
y=TubeVector(tdomain, dt, 2)
y[0],y[1]=x1,x2
fig_map.add_tube(y, "y"+str(i), 0, 1)
i=i+1
def move(x1,x2,a,t1=0,t2=0):
y1=np.cos(a)*x1-np.sin(a)*x2+t1
y2=np.sin(a)*x1+np.cos(a)*x2+t2
return [y1,y2]
def draw_hovercraft(x,colorbody,colorblades="black[gray]"):
def draw_body(a,x1,x2):
e=0.05
P=[[1,e],[e,e],[e,1],[-e,1],[-e,-1],[e,-1],[e,-e],[1,-e],[1,e]]
Pfront=[move(A[0],A[1],a,x1,x2) for A in P]
fig_map.draw_polygon(Polygon(Pfront), colorbody)
Q0=[[0,0],[0.1,0.1],[0,0.3],[0,-0.3],[-0.1,-0.1],[0,0.01],[0.2,0],[0,-0.01]]
Q=[move(A[0],A[1],0,-0.2,1) for A in Q0]
Q=[move(A[0],A[1],a,x1,x2) for A in Q]
fig_map.draw_polygon(Polygon(Q), colorblades)
Q=[move(A[0],A[1],0,-0.2,-1) for A in Q0]
Q=[move(A[0],A[1],a,x1,x2) for A in Q]
fig_map.draw_polygon(Polygon(Q),colorblades)
x1,x2,psi=x[0,0],x[1,0],x[4,0]
draw_body(psi,x1,x2)
fig_map.draw_circle(x1+np.cos(psi),x2+np.sin(psi),0.2,colorbody)
x0 = np.array([[0],[0],[2],[0],[1],[0]]) #(x,y,vr1,vr2,psi,w
dE1,dE2,dE3,dE4,dE5,dE6=0.001,0.001,0.001,0.001,0.2,0.001
ds=0.01
for s1 in np.arange(-dE1,dE1,ds): # We bisect the initial box
x1=x0[0,0]+Interval(s1,s1+ds)
for s2 in np.arange(-dE2,dE2,ds):
x2=x0[1,0]+Interval(s2,s2+ds)
for s3 in np.arange(-dE3,dE3,ds):
x3=x0[2,0]+Interval(s3,s3+ds)
for s4 in np.arange(-dE4,dE4,ds):
x4=x0[3,0]+Interval(s4,s4+ds)
for s5 in np.arange(-dE5,dE5,ds):
x5=x0[4,0]+Interval(s5,s5+ds)
for s6 in np.arange(-dE6,dE6,ds):
x6=x0[5,0]+Interval(s6,s6+ds)
TubeSimu(x1,x2,x3,x4,x5,x6)
x=x0
for t in np.arange(0,tmax,dt):
def f(x,t):
x1,x2,v1,v2,psi,w=x[0,0],x[1,0],x[2,0],x[3,0],x[4,0],x[5,0]
u1,u2=np.exp(-t),np.exp(-t)
dx1=v1*cos(psi)-v2*sin(psi)
dx2=v1*sin(psi)+v2*cos(psi)
return (np.array([[dx1],[dx2],[u1+w*v2],[-w*v1],[w],[u2]]))
def draw_center(x):
xc,yc=move(0,0,x[4,0],x[0,0],x[1,0])
fig_map.draw_circle(xc,yc,0.01,"red[red]")
x=x+dt*f(x,t)
draw_center(x)
draw_hovercraft(x0,"black[green]")
draw_hovercraft(x,"black[yellow]")
fig_map.show(1.)